Monkey

Monkey stripped to its essentials
Presently the only platforms to study human robotics interaction are expensive custom platforms which are developed over the course of several years at a very high development cost. Thanks to rapid growth in the toy industry, and the dramatic economies of scale, robotic toys have become available at very low cost for the functionality they offer. With some work, we can use those advances in toy design and manufacture as inexpensive platforms for human robotics interaction research. This work describes the development of a low cost humanoid research platform based on a Wowee Alive Chimpanzee.
For this toy to become a successful robotics research platform, it had to be heavily modified to allow arbitrary control of all actuators and to relay sensor information to the host computer. A board was developed to handle all low level motor control and communicate serial information via RS-232. To integrate seamlessly, the controller was designed to be the same size as the existing controller. To facilitate fabrication, the board will be two layers and will contain mostly through hole parts to allow easy hobbyist construction.
In the future, if there is commercial interest for this system as a robotics research platform, a kit may be developed. While Wowee has apparently discontinued production of the Alive Chimpanzee, they have begun production of an Alive Elvis which should be compatible with this modification.
Hardware Description
















The monkey has eight degrees of freedom.
- Neck, pan & tilt
- Eyes, pan (both eyes together), tilt (both eyes together), blink (both eyes together), eyebrows raise/lower (both eyes together)
- Mouth, lower jaw up and down, upper lip up and down – top of mouth fixed
There are a smattering of sensors embedded throughout the monkey
- Ears
- Microphones
- Ultrasonic? transducers
- Touch
- Top of head
- Bottom of head
- Bottom of chin
- Eyes
The eyes are special, it appears that there are low resolution image sensors embedded in the eyes of the monkey. They provide some feedback to the controller which allows it to crudely track moving objects in its field of view. I suspect they are using a similar scheme as Dusan Grujic in this article or in this article by Kevin Ross. Or, perhaps they could be using something similar to an optical mouse sensor. Furthermore, there are IR illuminators located in the nostrils. This should be investigated further.
There is also a sound module in the base which generates monkey noises. The communication protocol between the controller and the sound module has not yet been determined.
“Brain” Design
The replacement controller should allow any of the actuators to be positioned at an arbitrary location within their range of motion. The touch sensors will be routed through the controller. The design will initially require the use of a computer to interface with the board, though it is possible that in the future, the board could act alone. The schematic and PCB layout can be found below.
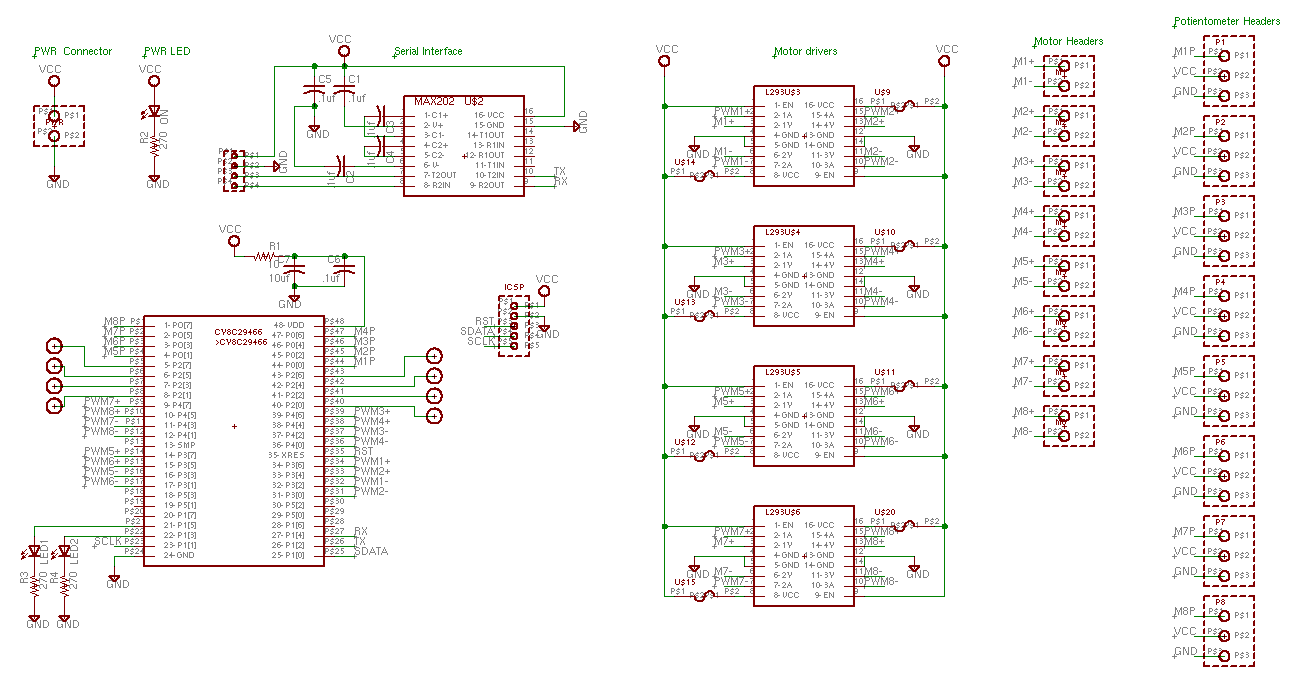 |
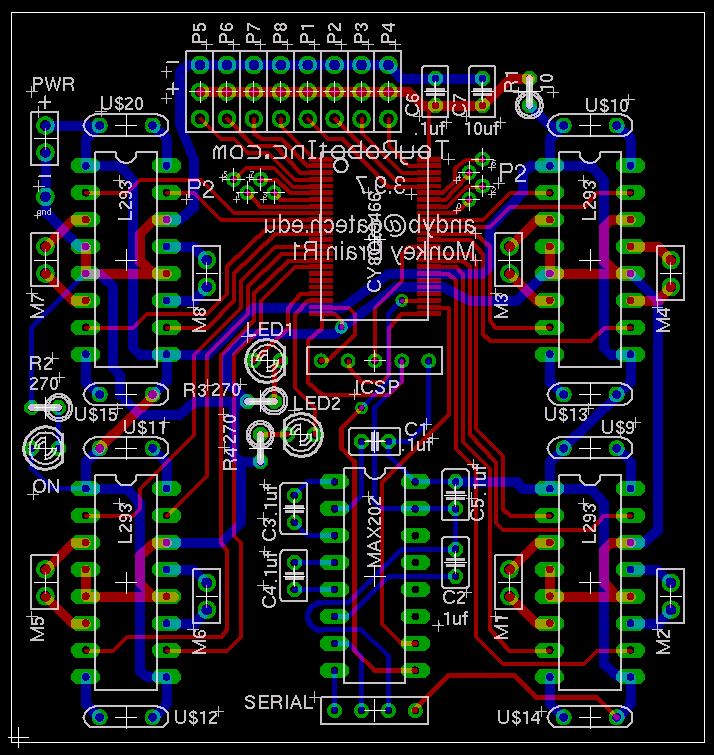 |
Parts
- Cypress PSoC 48 pin SSOP
- Dev Kit
- Design competition
- Power supply conditioning (probably overkill)
- 0.1 uF X7J ceramic capacitor Murata RPER71H104K2P1A03B
- 10uF tantalum capacitor
- 10 ohm resistor
- Power supply
- 4 D Batteries
- Stock wall adapter
- TI/Maxim MAX202 RS232 interface
- 4 x 0.1 uF X7J ceramic capacitors Murata RPER71H104K2P1A03B
- Motor System
- TI L293NE Quad Half Bridge Motor Drivers
- Fuses thermal auto reset 0.55 A hold 1.1 A trip Bourns MF-R055/90-0-ND
- Sockets 16 pin ED3116-ND
- Connectors
- ICSP Header 5 pins on 0.1 canters
- Motor Headers could not be sourced, 0.1 center pads used
- Potentiometers Headers could not be sourced, 0.1 center pads used
- Touch Sensor Headers could not be sourced, 0.1 center pads used
- Mic Headers could not be sourced, 0.1 center pads used
- Headers/pads for unused I/O 0.1 center pads used
- DB9 connector female vertical with board lock 9209FE-ND
- Status LEDs (3mm) and associated resistors (270 ohm)
- Power switch – in the base of the monkey – need to add power connector.
- Reset switch SW793-ND
Publicity
This project has been demonstrated at several events
- Georgia Tech Electrical and Computer Engineering Advisory Board Research Showcase
- Georgia Tech Electrical and Computer Engineering Undergraduate Research Symposium
- Georgia Tech Student Advisory Board for Undergraduate Research Robotics Symposium
Publicity materials can be found below.
Acknowledgements
This work was made possible by the Intel Opportunity Scholars Program, Dr. Ayanna Howard and the HumAnS Lab, and the Georgia Tech School of Electrical and Computer Engineering.
Special thanks to Sekou Remy for his patient guidance along the stages of this project.
External Links
- Project Wiki (outdated)